Scientific Computing Using Python - PHYS:4905 - Fall 2018
Lecture Notes #23- 11/27/2018 - Prof. Kaaret
Homework #16 is at the bottom of this page.
Differential equations
Differential equations occur very often in physics.  For
example, the motion of the damped, harmonic oscillator shown in the
figure to the right is described by the equation
For
example, the motion of the damped, harmonic oscillator shown in the
figure to the right is described by the equation
where
x is the displacement, m is the mass, c is
the damping force coefficient, and k is the spring constant.
A differential equation of any order can be converted to a set of
first-order differential equations. For the example above, we
can introduce the velocity as a new variable,
and rewrite the second-order differential equation as two coupled,
first-order differential equations,
This is the general form that we will use since it is the form
needed by the differential equation solvers built into the SciPy
library (and also many Fortran and C libraries). We consider a
set of first-order differential equations over a set of
variables with i = 1,
2, ... N, where the derivatives are set by a set of
functions so that
Boundary waters
In addition to the differential equation, we need to know the
boundary conditions to calculate the behavior of our physical
system. There are two categories of ways to set the boundary
conditions. The first defines initial value problems.
In an initial value problem, one sets the initial values. In
the damped harmonic oscillator problem, we would set the initial
value of the displacement and the velocity at some time usually
taken as t = 0. That would specify the right hand side
of our set of equations at that time. We would then use the
differential equations to calculate the values of x and v
at all later times of interest.
The other way to set boundary conditions is to specify the starting
and ending point. These are called boundary value problems.
For example, you might specify that the mass should be at zero
displacement at t = 0 and then again at t = T.
You would then have to figure out the appropriate velocity at t
= 0 to make that work out. A more realistic example is that
you might want to have your ballistic projectile hit a specific
target after being launched from a fixed location. Again, you
set the beginning and starting points, but need to find the
appropriate initial value for the velocity. Problems involving
the calculation of electric fields typically start with
specification of a configuration of charges then one needs to find
the intervening field. These are also boundary value problems.
For today, we'll concentrate only on initial value problems.
They are easier. Boundary value problems require different
techniques for their solution.
Euler method
Let's consider the differential equation
with the initial value
We can approximate the derivative with a finite difference
We
can solve this for y(t+h),
Using our equation for the derivative,
To program this, we use h as the step size and construct a
time sequence
and find the value of y at each time step,
This is the Euler method. Unfortunately, the Euler
method is not very accurate.
 You can see why, from the
graph to the right (from the Wikipedia page on the Euler method)
in which the blue curve shows the correct solution of the
differential equation and the red segments show the approximate
solution from the Euler method. In the Euler method, the slope
of the function is estimated from the start of the interval.
One assumes a constant slope over the interval to calculate the next
point. If the slope is changing, as in this example, this
leads to inaccuracy. Since we don't usually don't actually
know the correct solution of the different equation (or we wouldn't
be calculating it numerically), the error builds up over time.
The local error, or the error per step, is proportional to the
square of the step size. The global error, or the total
accumulated error, is proportional to the step size. The
scaling of error with step size leads to the Euler method being
called a first-order method.
You can see why, from the
graph to the right (from the Wikipedia page on the Euler method)
in which the blue curve shows the correct solution of the
differential equation and the red segments show the approximate
solution from the Euler method. In the Euler method, the slope
of the function is estimated from the start of the interval.
One assumes a constant slope over the interval to calculate the next
point. If the slope is changing, as in this example, this
leads to inaccuracy. Since we don't usually don't actually
know the correct solution of the different equation (or we wouldn't
be calculating it numerically), the error builds up over time.
The local error, or the error per step, is proportional to the
square of the step size. The global error, or the total
accumulated error, is proportional to the step size. The
scaling of error with step size leads to the Euler method being
called a first-order method.
Runge-Kutta methods
The accuracy of our estimate for the value of y at the next
time step could be improved if we divided up the time step and used
multiple function evaluations to improve our estimate of the
derivative. In the midpoint method, we divide the step
into two pieces. First, we find the value at the midpoint of
the interval,
Then we substitute that (t, y) position into our
integration step equation (1) to get a new equation,
The global error of the midpoint method is proportional to the
square of the step size, so it is a second order method.
This is a significant improvement over the Euler method, but we can
keep going to higher orders. Methods of this type are call
Runge-Kutta methods. The most widely used Runge-Kutta method
is the fourth-order method. It uses a weighted average of four
estimates of the slope of the function
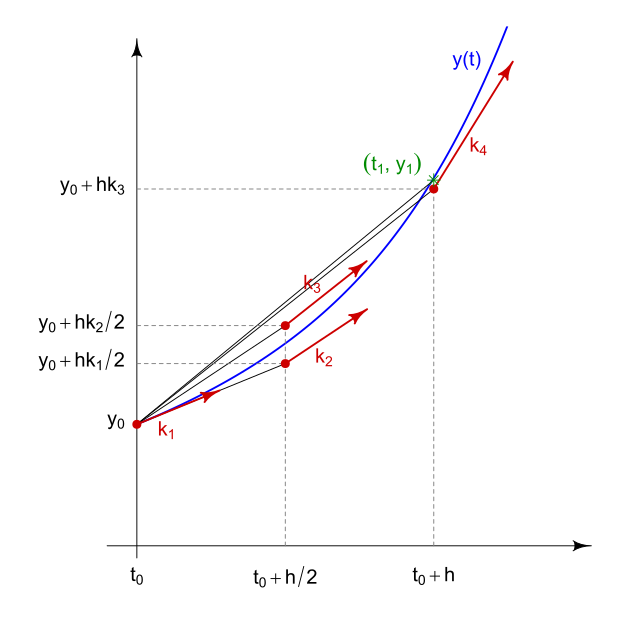
These are shown graphically in the figure to the right (from
Wikipedia's page on Runge-Kutta
methods). There is a slope estimate from the beginning
of the interval, one from the end of the interval, and two from the
middle of the interval. Note that the calculation of each
slope makes use of the previously calculated slope.
For the integration step, we use a weighted average of these four
slope estimates with the ones from the middle of the interval
weighted higher.
This Runge-Kutta method is fourth order, meaning that the total
accumulated error scales as
. The
method is called RK4, the "classical Runge-Kutta method", and "the
Runge-Kutta method". RK4 requires four evaluations of the
function f per time step to achieve fourth order. The
fifth-order Runge-Kutta method requires six function evaluations per
time step, and so generally produces a declining return on accuracy
achieved versus computation required.
You may recognize the set of coefficients in RK4; they are the same
as those in Simpson's rule used for numerical integration.
Indeed, if f does not depend on y, then solution of
the differential equation becomes a simple integration and RK4 is
equivalent to Simpson's rule.
Adapt to the times
To perform accurate numerical integration while minimizing the
computation required, numerical quadrature algorithms adapt the grid
spacing. The same is true for the solution of differential
equations. Adaptive differential equation solvers adjust the
step size to achieve the desired accuracy.
To do this, we need an estimate of the accuracy of the
integration. This is usually done by comparing two different
methods, with one of order p and one of order p-1.
For Runge-Kutta methods, this is computational efficient because the
two methods have common intermediate steps. If the estimated
error exceeds a user-defined threshold, then the step size is
decreased and the step is repeated. Conversely, if the error
is well below the threshold, then the step size is increased in
order to save on computations.
We will be using a Python routine that, by default, uses the "RK45"
method for adaptive solution. RK45 does calculations using a
fifth-order Runge-Kutta method and checks their accuracy by
comparing with a fourth-order Runge-Kutta method. This method
works well and is reasonably computationally efficient in most
cases. If you have equations that particularly troublesome,
then you'll need to read about other methods.
Homework #16
For HW #16, you will write Python code to numerically solve the
equations of motion for the coupled oscillators from lecture
#22. We have two masses, each with mass m, attached by
springs with spring constants as shown in the figure below with x1
being the displacement of the first mass from its equilibrium
position and x2 being the displacement of the
second mass from its equilibrium position.
The equations of motion are
We can convert these to a system of first-order differential
equations by introducing the velocities,
Then, we have the system of equations
We will be using the solve_ivp routine in the scipy.integrate
package. This routine calculates the solution of a
system of ordinary first-order differential equations given a set of
initial values. The problem is defined as
where t is a scalar variable, y is an n-dimensional
vector, and f is a function that returns an n-dimensional
vector giving the derivatives of y at the time t.
We will translate our variables into a numpy array by setting the
elements of y to be
. Our
function is then
def dfun(t, y) :
# find derivatives at current time
# t = time, not used explicitly
# y = vector [x1, v1, x2, v2]
# constants defining the system
k = 2.0 # [N/m] spring constant for edge springs
kappa = 2.0 # [N/m] spring constant for center
spring
m = 1.0 # [kg] mass of masses
# unpack y into physical variables
x1 = y[0] # displacement of mass 1
v1 = y[1] # velocity of mass 1
x2 = y[2] # displacement of mass 2
v2 = y[3] # velocity of mass 2
# calculate derivatives
dx1dt = v1
dv1dt = -x1*(k+kappa)/m + x2*kappa
dx2dt = v2
dv2dt = x1*kappa -
x2*(k+kappa)/m
# return derivatives packed into an array
return np.array([dx1dt, dv1dt, dx2dt, dv2dt])
Let's start our masses at rest, with the first mass displaced by 0.1
meters in the positive direction and the second by 0.2 meters.
Our initial values are then
y0 = [0.1, 0.0, 0.2, 0.0]
Now, let's integrate the equations of motion for 20 seconds.
We specify that by using a tuple with the initial and final times
t_span = (0.0, 20.0)
We can now call solve_ivp to do the calculations.
The calling sequence is
from scipy.integrate import solve_ivp
sol = solve_ivp(dfun, t_span, y0, rtol=1E-6, atol=1E-9)
The variables rtol and atol specify the relative
and absolute tolerances on the accuracy of the computation.
The solver keeps the local error estimate at each step less than atol
+ rtol * abs(y).
You may want to play with these to get better solutions. Also,
it is possible to pass arrays if you need to set the tolerances on
each component of y individually.
The routine returns a "bunch object" with a bunch of fields.
Some of the most useful ones are
sol.t = the time points used
sol.y = the values of the variables at each time point.
sol.success = True if a solution was obtained.
The solve_ivp routine has many optional parameters and
many fields that it returns that are described at its reference page
https://docs.scipy.org/doc/scipy/reference/generated/scipy.integrate.solve_ivp.html#scipy.integrate.solve_ivp.
Of particular interest is the events parameter that you
can use to terminate the integration under certain conditions, e.g.
if you are integrating the trajectory of a projectile, you can stop
the integration when it falls back to Earth. There are explanations
and examples for the different options on the reference page.
Using the code fragments above, write a Python program that
integrates the equations of motion for a pair of coupled
oscillators. Set the masses and spring constants to the values
defined in the function dfun. Have your code:
1) Make a plot that could be used to graphically estimate the
eigenfrequency for the eigenmode where the two oscillators move in
unison and print out your estimate using your plot. Note that
you don't have to program in a way to estimate the
eigenfrequency. You can do this by hand and then code your
procedure and result into the print statement, e.g. "I measured the
intervals containing three successive peaks to be 62 seconds,
therefore the period is 31 seconds".
2) Make a plot that could be used to graphically estimate the
eigenfrequency for the eigenmode where the two oscillators move in
opposition and print out your estimate using your plot.
3) Print out the displacement and velocity of each mass at t
= 20 s for the initial conditions where the first mass starts
displaced by 0.3 meters, the second mass starts at the equilibrium
position, and both masses start at rest.
Please hand in your code electronically.
